2-4路360度环视技术
 网络模型
网络模型
参与“北大深研院”和“深国科”校企合作项目
随着经济社会的发展,汽车越来越普及,人们对于汽车的安全性要求也随之提高。汽车的安全性能提高不仅有利于驾驶员、乘客,也间接地对城市的道路交通状况有帮助。2-4路360度环视技术作为驾驶员驾车的辅助技术,给驾驶员一个新的视角:高空鸟瞰。通过高空鸟瞰的视角对于车辆四周360度环绕有非常清楚的认识,进而可以帮助驾驶员更好的分析、判断路况,特别是在倒车入库、低速行车过程中,360度环视技术可以显著提高行车安全性。
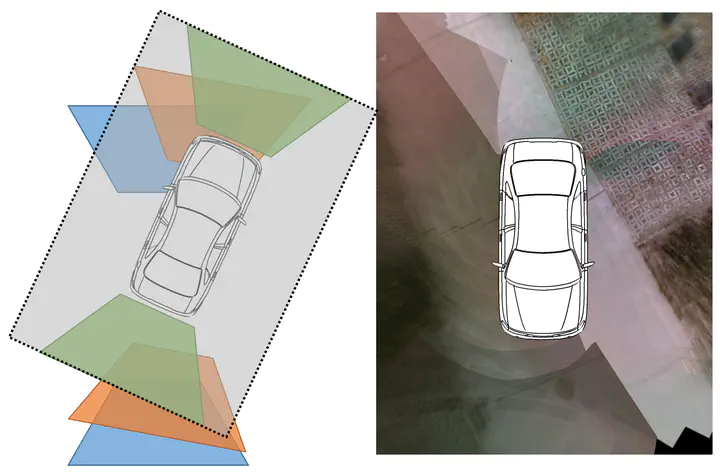
通过安装在车身上的2-4个鱼眼摄像头,获得前后左右2-4个方向的图片。对于这2-4个图片进行鱼眼矫正、视角转换、图像色差处理、环视合成这2-4个步骤,得到最终的环视图并显示在驾驶员的屏幕上,辅助驾驶员判断车子附近的情况。目前以opencv等开源的图像库为基础,构建、优化我们的360度环视系统。在此技术基础上,可以引入更多技术:图像显示方面,把2D显示转换为3D;速度方面:通过GPU加速计算,使得每一秒处理的图片更多,使得环视系统更有实时性,这些是我们增强360度环视系统的方向。